OTOMOBİLLERİN AERODİNAMİK KARAKTERİSTİĞİNİN BİR RÜZGAR TÜNELİNDE İNCELENMESİ
H. Y. AKA
H.Yildiz.Aka@metroloji-okulu.com.tr
1. GİRİŞ
1744 yılında akışkan ortamdaki cisimler üzerinde çalışan D'Alembert, cisim üzerine etki eden bir direncin varlığını görüyor ancak bunun nedenini açıklayamıyordu. D'Alembert paradoksu olarak bilinen bu durum, akışkan moleküllerinin hem birbirleri hem de cisim ile aralarındaki sürtünme direncinden kaynaklanıyordu ve büyüklükleri cismin geometrisine göre değişen kuvvet ve momentleri oluşturuyordu. Akışkanın hava olduğu bir ortamda cisim üzerine etki eden bu kuvvet ve momentler aerodinamik kuvvet ve momentler olarak adlandırılır.
Aerodinamik kuvvetin cismin hareket yönüne paralel ve ters yönlü olan bileşeni "sürüklenme direnç kuvveti (FD)", cismin baş ve kuyruk uç noktalarından geçen eksene göre dik olan bileşeni " kaldırma kuvveti (FL)" olarak tanımlanır. Cismin, otomobil gibi bir araç olması halinde aracın ön ve arka akslarına paralel etkiyen kaldırma kuvvetlerinin eşit olmamasından kaynaklanan moment, oluşan hareketin biçimi nedeniyle "yunuslama momenti (MR)" olarak adlandırılır. Araçların aerodinamik karakteristikleri belirlenerek, aerodinamik açıdan kaliteleri kıyaslanırken bu büyüklüklerin boyutsuz katsayılara dönüştürülmüş değerleri kullanılır. Sürüklenme direnç kuvvetinin boyutsuz haline "sürüklenme direnci katsayısı (CD)", kaldırma kuvvetinin boyutsuz haline "kaldırma kuvveti katsayısı (CL)", moment büyüklüklerinin boyutsuz haline "moment katsayısı (CM)", yunuslama momentinin boyutsuz haline "yunuslama momenti katsayısı (CMR)" denir.
Saatteki hızı 100 km olan bir binek otomobili, gücünün %60'ını hava ile sürtünmeden kaynaklanan sürüklenme direnci kuvvetini, %20'sini tekerlek sürtünme kuvvetini, %20'sini hareketi önleyen diğer kuvvetleri yenmek için harcar. Aracın aerodinamik özelliklerinin iyileştirilmesi ile yakıt sarfiyatından önemli ölçüde tasarruf sağlanır. Aracın aerodinamik karakteristiğinin araç kirliliği, motor soğutma sistemi, havalandırma sistemi, fren sistemi, araç etrafındaki hava akışından kaynaklanan gürültü miktarı gibi birçok parametre üzerine de etkisi vardır (1).
Kaynakların içerik ve yayımlanma tarihleri incelendiğinde kara taşıtları ve özellikle otomobillerin aerodinamik özelliklerinin araştırılmasının İkinci Dünya Savaşı sonrasında önem kazandığı görülür. Özellikle sürüklenme direnci katsayısını küçültmeye yönelik araştırmalar yapılmıştır. Araştırma sonuçları hızla üretime yansıtılmış ve düzenlenen otomobil yarışlarında diğer özelliklerin yanında aerodinamik yapılar da karşılaştırılmıştır.
Aerodinamik etkilerin deneysel olarak rüzgar tüneli kullanılarak incelenmesi ile ilgili ilk çalışmalar 1960'lı yıllara rastlar. White (2), 1969 yılında yayımladığı makalede, 1961-1968 yılları arasında arka arkaya raporlar yayımlayan Motor Industry Research Association'ın (MIRA) 141 farklı araca dair aerodinamik test sonucu verdiğini ve MIRA'nın raporlarının bugün için de çok değerli başvuru kaynakları olarak kabul edildiğini belirtir. Aynı makalede MIRA'dan sonra ilk olarak Carnish'in 13 ve Bowman'ın 21 araç üzerinde kısıtlı sayıda model üzerinde deneysel araştırmalar yaptıklarına değinilir. Bu arada deneysel olmayan sayısal analiz yöntemleri de geliştirilmeye başlandı. 1969 yılında White (2) araçların sürüklenme direnci katsayısını (CD) sayısal olarak hesapladı. White, daha önce deneysel olarak CD katsayıları belirlenmiş 20 araç üzerinde metodunu uyguladı ve ± % 7 doğruluk oranıyla MIRA'nın deneysel sonuçlarına yaklaştı.
Zamanla araçlarda CD katsayısının azaltılmasını sağlayacak yöntemler de araştırıldı. Araca ilave edilen aksamlar geliştirildi. Bunlardan en yaygın olanları kanatçıklar, spoyler (spoiller) ve hava bentleri (airdam) idi. Schenkel (3) 1977 yılında yayımladığı bir makalede, aracın önüne ve arkasına ilave edilen spoyler'ın sürüklenme ve kaldırma kuvvetleri (drag ve lift) üzerindeki etkilerini 3/8 ölçekli bir model üzerinde rüzgar tünelinde inceledi. 1991 yılında Ohno ve Kohri (4) "kenar hava bentleri (side airdam)" ilavelerinin aracın aerodinamik performansına etkilerini rüzgar tünelinde incelediler. Çeşitli otomobillere ilave edilen kenar hava bentlerinin uygun geometrik biçimde olmaları halinde CD ve CL'yi azaltma yönünde etkiledikleri sonucuna vardılar.
Bir başka çalışmada Geropp, ve Odenthal (5) 2000 yılında "Coanda Effect" yöntemini otomobil için araştırdılar. Bu yöntem aracın arkasından çıkanın havanın emilip hızlandırıldıktan sonra tekrar püskürtülmesi sonucunda, aracın arkasındaki girdaplı bölgenin (wake) daraltılması ve dolayısıyla aracın CD katsayısının azaltılması esasına dayanır. Geropp ve Odental çalışmalarının sonucunda "Coanda Effect" yöntemiyle CD katsayısının 0,39'dan 0,35'e düştüğü, yani toplam CD'de % 10 mertebesinde düşüş olduğu sonucuna vardılar.
20. yüzyılın sonlarına doğru gelişen bilgisayar teknolojisi ve sayısal yöntemler, aerodinamik karakteristiğin belirlenmesinde de kullanılmaya başladı. Bu çalışmalarda genellikle rüzgar tüneli deneyleri bilgisayar yazılımı ile simüle edilmeye çalışılır ve Navier-Stokes denklemleri nümerik çözülür. Kısıtlı örnekler için sayısal yöntemler başarılı olduğundan, prototiplerin test edildiği ve çok büyük yatırımlarla imal edilen ve işletme maaliyetleri de aynı oranda büyük olan rüzgar tünelleri ile yapılan deneyler önemini korumaktadır.
Bu tez çalışmasında, deneyler küçük ölçekli bir model üzerinde ve küçük bir rüzgar tünelinde yapılmıştır. Günümüz teknolojisi bir taraftan yüksek doğruluklu ölçü aletlerinin imal edilmesini sağlarken bir taraftan da ölçü aletlerinin boyutlarını küçülterek, küçük yüzeyler ve cisimler üzerinde çalışma kolaylığı getirmiştir. Bu çalışmada bu olanakların tümünden yararlanılmıştır. Deneylerde 300mm x 300mm kesitli bir rüzgar tünelinde ~ %10 blokaj oranı ile çalışılabilecek küçük bir model kullanılmıştır. Minyatür bir kuvvet ölçüm düzeneği tasarlanmış ve imal edilmiştir. Seçilen model otomobilin CD, CL ve CMR katsayılarının hıza bağlı (Re sayısına) değişimi araştırılmış ayrıca model üzerindeki basınç da dağılımı ölçülmüştür. Deneyler birçok defa tekrar edilmiş sistematik ve rastgele hata kaynakları araştırılmıştır.
2. AERODİNAMİK KUVVETLER VE AERODİNAMİK
KARAKTERİSTİĞİN BELİRLENMESİ
Otomobiller için aerodinamik karakteristik CD, CL, CM katsayılarının büyüklüğü ile ifade edilir. Söz konusu katsayılar küçüldükçe aracın manevra, hızlanma, yol tutuş kabiliyeti gibi özelliklerinde de iyileşme görülür. Hava sürtünmesini yenmek için harcayacağı enerji miktarı da küçüleceğinden yakıt sarfiyatında önemli bir azalma gözlenir. Bu nedenle aerodinamik karakteristik, üreticiler için önemli bir rekabet alanı olduğu kadar, ülke ekonomisi açısında da önemlidir. Aerodinamik karakteristiğin nasıl belirleneceğini anlamak için öncelikle aşağıdaki temel kavramların bilinmesi gerekir.
2.1 Aerodinamik Kuvvetler
Uçakların kanatları, gövdeleri, kuyrukları ve otomobil gibi bir akışkan ortamdaki hareketli cisimler üzerine etki eden aerodinamik kuvvetlerin kaynağı, araç yüzeyindeki basınç dağılımı ile kayma gerilmesi dağılımıdır. Şekil 2.1'de gösterildiği gibi araç üzerindeki basınç dağılımı (p) ve kayma gerilmesi (t ) tüm araç yüzeyi için integre edilirse bunların sonucunda F aerodinamik kuvveti ve M aerodinamik momenti bulunur.
Akış alanı içinde, araçtan çok uzaktaki akışa serbest akış denir. Araç üzerine etki eden aerodinamik kuvvetin serbest akış hızına paralel yöndeki bileşenine "sürüklenme direnç kuvveti (drag)" ve serbest akış hızı doğrultusuna dik yönde oluşan aerodinamik kuvvet bileşenine "kaldırma kuvveti (lift)" denir. (Şekil 2.2'de bir otomobil üzerinde oluşan aerodinamik kuvvetler gösterilmiştir.)
Aerodinamik kuvvetin, aracın baş ve kuyruk uç noktaları arasından geçen eksene göre değerlendirildiği de olur. Aerodinamik kuvvetin eksene dik yöndeki bileşenine "normal kuvvet" ve eksene paralel olan bileşenine "eksenel kuvvet" denir ve aşağıdaki gibi ifade edilebilir.
![]() ve
ve ![]() [2.1]
[2.1]
Burada a =serbest akış hızı doğrultusunun kanatçık ekseni ile yaptığı açıdır (atak açısı).
Serbest akış hızı V¥ olan akış ortamındaki kanatçık üzerine etki eden kuvvet ve momentler iki boyutlu uzayda analiz edilmek üzere kanadın, ekseni x ekseni ile çakışacak şekilde a kadar saat tersi yönünde çevrildiği düşünülürse, (Şekil 2.4)
kanatçık üzerine etki eden basınç ve kayma gerilmesinin neden olduğu toplam normal kuvvet ve toplam eksenel kuvvet aşağıdaki gibi gösterilebilir.
Burada q basıncın düşey eksenle yaptığı açıdır.
Kanatçığın x eksenin üstünde kalan üst yüzeyine etki eden kuvvetler:
![]() [2.2]
[2.2]
![]() [2.3]
[2.3]
Benzer şekilde kanatçığın x ekseni altında kalan yüzeyine etki eden kuvvetler:
![]() [2.4]
[2.4]
![]() [2.5]
[2.5]
Eş. 2.2, Eş. 2.4 ve Eş. 2.3, Eş. 2.5 A ve B noktaları arasında integre edilirse birim boy için kanatçığın üst yüzeyine etki eden normal ve eksenel kuvvetler bulunur.
![]() [2.6]
[2.6]
![]() [2.7]
[2.7]
Benzer şekilde kanatçığın üst ve alt yüzeylerine etki eden momentler aşağıdaki gibi gösterilebilir.
![]() [2.8]
[2.8]
![]() [2.9]
[2.9]
Eş. 2.8 ve Eş. 2.9 integre edilerek kanatçığın üzerine etki eden toplam moment bulunabilir.
 [2.10]
[2.10]
Söz konusu cisim belirli bir geometrik şekle sahip olmadığında yukarıdaki denklemleri teorik olarak çözerek aerodinamik kuvvet ve moment büyüklüklerini elde etmek güçtür. Cisimlerin durağan hava ortamında hareket etmeleri ile cismin hareket yönüne paralel yönde rüzgara maruz kalması arasında bir fark yoktur. Bu nedenle cisimlerin aerodinamik karakteristiği, cisim sabit durduğu halde rüzgar tünelinde hava akışına maruz bırakılarak üzerine etki eden kuvvet ve momentlerin ölçüldüğü deneylerle belirlenir. Bu amaçla kullanılan rüzgar tünelleri kuvvet, moment ve basınç ölçümü yapılabilecek donanımlara sahiptirler.
Sürüklenme direnci kuvveti ve kaldırma kuvvetleri dışında otomobiller üzerine etki eden aerodinamik kuvvet ve momentlere, araçta yarattığı tepkilere bağlı olarak aşağıda verilen özel adlar verilmiştir.
Yanal Kuvvet (FY) : Rüzgar nedeniyle araca
yanlardan etki eden kuvvet
Yunuslama Momenti (MR):
Aracın ön ve arkasından etki eden kaldırma kuvvetleri
birbirine eşit olmadığında oluşan moment
Yuvarlama Momenti ( MY) : Aracın sağ ve sol taraflarına etki
eden kaldırma kuvvetleri birbirine eşit olmadığında oluşan
moment
Yana Kayış Momenti (MM): Yanal rüzgarların aracın ön ve arkasına aynı
şiddetle etki etmediği durumlarda oluşan moment
2.2 Buckingham Pi Teoremi ve Otomobil Üzerindeki Akışın Boyut Analizi
Cisim üzerindeki aerodinamik kuvvet ve momentler kuvvet birimleri cinsinden ifade edildiğinde karşılaştırma yapmak güçtür. Zira her araç için farklı büyüklüklerde kuvvet ve momentler oluşacaktır. Oysa bu büyüklüklerin boyutsuz hale getirilmesi aracın aerodinamik yapısı hakkında kolayca fikir sahibi olunmasını sağlar. Bunun için akışkanlar dinamiğinde incelenen parametreler üzerinde boyutsal analiz yöntemleri uygulanır. Boyutsal analiz için kullanılan en yaygın yöntem Buckingham Pi teoremidir.
Buckingham Pi teoremi kullanılarak, bağımlı bir değişkene etki eden bağımsız değişkenler boyutsuz sayılar olarak birleştirilerek analiz için gerekli olan değişken sayısı azaltılır.
Otomobil üzerine etki eden sürüklenme kuvveti, FD:
L karakteristik uzunluk,
V serbest akış hızı,
r akışkanın
yoğunluğu,
µ akışkanın viskozitesine bağlıdır.
Genel olarak q1= f(q2, q3, q4.....qn) şeklindeki bir fonksiyonda bir bağımlı değişken n-1 sayıda bağımsız değişkenin fonksiyonu olarak gösterilebilir. q1 bağımlı değişken, q2, q3, q4.....qn ise bağımsız değişkenlerdir. Matematiksel olarak, g(q1, q2, q3, q4.....qn)=0 şeklinde yeni bir fonksiyon yazılabilir. Aralarında g(q1, q2, q3, q4.....qn)=0 şeklinde bir bağıntı bulunan n adet bağımsız parametre (n-m) adet bağımsız boyutsuz sayı yada p parametreleri şeklinde gruplandırılabilir. Yani G (p 1, p 2, p 3, ....., p n-m)=0 veya p 1= G(p 2, p 3,....., p n-m) şeklinde yeni fonksiyonlar elde edilebilir. Burada m değişkenlerdeki temel boyutların (MLT veya FLT) toplam sayısıdır. Buna bağlı olarak otomobil üzerine etki eden sürüklenme kuvveti FD = f(V, L, r , µ) şeklinde ifade edilebilir. Aşağıdaki işlemler uygulanarak boyutsuz gruplar oluşturulabilir.
1) İlgili bütün değişkenlerin listesi yapılır.
FD, V, L, r , µ , ve buna göre n = 5
2) Temel gruplardan MLT veya FLT seçilerek bütün değişkenler temel boyutlar cinsinden ifade edilir.
FD V L r µ
ML/t² L/t L M/L³ M/Lt
Tekrarlayan temel boyut sayısı r = 3
3) Listedeki r , V, L değişkenleri tekrarlanan değişkenler olarak seçilir. Buna göre m = r = 3 bulunur. Geriye kalan parametreler (F, µ), tekrarlanan parametreler ile gruplanır. Boyutsuz grup sayısı n-m = 5-3 = 2 olarak bulunur ve aşağıdaki fonksiyonel ilişkiler yazılabilir.
p 1 = f1(r ,V,L,FD), p 2 = f2(r ,V,L,µ), p 1 = f3(p 2)
p 1 = r a Vb Lc FD, p 2 = r d Ve Lf µ
4) p 1= r a Vb Lc FD
(M/L³) a (L/t) b Lc ML/t²
p 1 Boyutsuz bir sayı olduğundan eşitliğin sağ tarafının da boyutsuz olması gerekir. Buna göre,
M : a+1=0 buradan a = -1
t : -b-2=0 buradan b = -2
L : -3a+b+c+1=0 a ve b denklemde yerine konulursa c=-2 bulunur.
Buna göre p 1 = f1(r ,V,L,FD) ![]() elde edilir. [2.11]
elde edilir. [2.11]
Aynı şekilde yukarıdaki işlemler uygulanarak p 2 aşağıdaki gibi bulunur.
p 2= r d Ve Lf µ
(M/L³) d (L/t) e Lf M/Lt
M : d+1=0 buradan d=-1
t : -e-1=0 buradan e=-1
L: -3d+e+f-1=0 d ve e denklemde yerine konulursa f=-1 bulunur.
buna göre p 2 = f2(r ,V,L,µ) ![]() elde edilir ve tersi
Reynolds sayısı olarak bilinir.
elde edilir ve tersi
Reynolds sayısı olarak bilinir.
![]() [2.12]
[2.12]
Bu şekilde otomobil üzerindeki akış için Eş. 2.11 ve Eş. 2.12'de verilen iki boyutsuz katsayı elde edilmiş olur. Bu iki boyutsuz katsayı arasında
p 1= f3(p 2) veya ![]() veya
veya ![]() ilişkisi vardır.
[2.13]
ilişkisi vardır.
[2.13]
Eş. 2.11' de L² iki boyutlu bir büyüklük olduğundan yerine otomobilin karakteristik alanını koymakta ve hatta 1/2 gibi bir katsayı ile çarpmakta bir sakınca yoktur. Böylece bu parametreyi akışa maruz kalan cismin akışa karşı gelen yüzeyine bağlı bir denklem olarak ifade edebiliriz. Literatürde söz konusu karakteristik alan, cismin akışa karşı yüzeyinin harekete dik düzlem üzerindeki izdüşümü olarak tanımlanır.
 [2.14]
[2.14]
Buna göre p 1 ve p 2 arasında yeni bir fonksiyonel ilişki oluşur.
 [2.15]
[2.15]
 = CD [2.16]
= CD [2.16]
Eş. 2.16 sürüklenme direnç katsayısı (CD) olarak bilinir. Buna göre Re sayısı ve CD katsayısı arasında CD = f5(Re) ilişkisi olduğu görülür. [2.17]
Benzer şekilde otomobil üzerine etkiyen diğer aerodinamik kuvvet ve momentler de boyutsuz olarak ifade edildiğinde aşağıdaki eşitlikler elde edilir.
Kaldırma kuvveti katsayısı  [2.18]
[2.18]
Yanal kuvvet katsayısı  [2.19]
[2.19]
Yunuslama momenti katsayısı  [2.20]
[2.20]
Yuvarlanma momenti katsayısı  [2.21]
[2.21]
Yana kayış momenti katsayısı  [2.22]
[2.22]
Buckingham Pi teoremi basınç için uygulandığında elde edilen boyutsuz katsayıya "basınç katsayısı" denir ve aşağıdaki gibi tanımlanır.
Basınç katsayısı  [2.23]
[2.23]
2.3 Benzerlik
Akışkanlar dinamiği ile ilgili deneysel çalışmaların gerçek prototipler üzerinde yapılmaları, prototipin boyutlarının büyüklüğü, deney teçhizatının maliyeti vs. gibi nedenlerle genellikle çok güç olduğundan, model kullanımı kaçınılmaz hale gelir. Sonuçların prototip üzerindekine uygunluğunun sağlanması için modelin belirli özelliklerinin prototipin özellikleri ile aynı veya yakın değerlerde olması şarttır. Akışkanlar dinamiği deneylerinde prototip ve model arasında üç farklı benzerlik şartı aranır:
1) Geometrik benzerlik 2) Kinematik Benzerlik 3) Dinamik Benzerlik
Bu bölümde yukarıdaki benzerlik şartlarının kısa tanımları yapıldıktan sonra bu çalışma için benzerlik kontrolü ele alınmıştır.
2.3.1 Geometrik benzerlik
Geometrik benzerliğin sağlanması için modelin boyutsal ölçülerinin, prototipin boyutsal ölçüleri ile orantılı olması gerekir.
Deneylerde kullanılan model, piyasada kullanılmakta olan bir binek otomobilin 1/16 oranında küçültülmüş modelidir. Prototipe ait boyutsal ve teknik özellikler prototip imalatçısının web sitelerinden temin edilmiş ve model boyutlarının prototip boyutlarına göre 1/16 oranında küçültülmüş olduğu ölçülerek tesbit edilmiştir. Aşağıda model üzerinde ölçülen boyutsal değerlere karşılık prototip imalatçısının internet sitelerinden elde edilen boyutsal değerler ve aralarındaki oran gösterilmiştir.
Model Prototip Oran (model/prototip)
Genişlik : 110 mm 1739 mm 15,8
Uzunluk : 280 mm 4471 mm 16,0
Yükseklik : 89 mm 1434 mm 16,1
Akslar arası uzaklık : 168 mm 2725 mm 16,2
2.3.2 Kinematik benzerlik
Kinematik benzerlik şartının sağlanması için prototip ve model üzerindeki hız vektörleri paralel ve mutlak değerlerinin oranlarının sabit olması gerekir.
VAp / VAm = VBp / VBm = Vop / Vom = C = sabit
aAp / aAm = aBp / aBm = aop / aom = C = sabit
Aerodinamik deneylerde kinematik benzerlik şartının sağlanması, akım çizgilerinin model ve prototip için aynı olduğu anlamına gelir. Rüzgar tüneli deneylerinde kinematik benzerliğin sağlanması blokaj etkisine de bağlıdır. Gerçekte durağan halden hareketli hale geçen otomobil çevresinde oluşan hava hareketi, aracın dış yüzeyinde bir sınır tabaka oluşmasına neden olur. Akışkanın sınır tabaka içindeki hızı plaka yüzeyinden yukarı doğru parabolik bir oranla artar, plaka yüzeyinden itibaren belirli bir d yükseklikte hız serbest akış hızına eşit olur. Prandtl, d yüksekliğini "sınır tabakası kalınlığı" olarak adlandırmıştır.
Model, tünel kesit alanı içerisinde büyük bir alanı işgal ederse model ile tünel duvarı arasında kalan alan daralır ve akışkan hızını koruyarak bu dar alandan akıp geçemeden bloke olur ve sınır tabakanın üzerinde akış hızı serbest akış hızına eşit olamaz, akış düzeni bozulurak blokaj hataları oluşur. Bunun sonucu olarak akım çizgilerinin gerçekte prototip üzerinde oluşan akım çizgileriyle paralellik şartı sağlanamaz. Ölçülen serbest akış değeri doğru olamayacağından deneylerde elde edilen sonuçlar da gerçeği yansıtamaz. Blokaj oranı model kesit alanının rüzgar tüneli deney odasının kesit alanına oranı olarak tanımlanır. Literatürde rüzgar tüneli deneylerinde blokaj etkilerinin ihmal edilebilir düzeyde olabilmesi için blokaj oranının %10 sınırının altında olması tavsiye edilir.
Blokaj oranı = Model Kesit Alanı / Deney Odası Kesit Alanı
Çakmak (1), Blokaj oranının değişik rüzgar tünellerinde %4 ile %20 arasında değiştiğini bu oranının %10 veya daha düşük seviyelerde olmasının benzerlik şartı için kabul edilebilir değer olduğunu ifade etmektedir..
Bu çalışma için blokaj oranı 0,0095 m²/0,09= %10,5 olup, yukarıda verilen kritere uygun olduğundan deneysel veriler değerlendirilirken blokaj etkileri ihmal edilmiştir.
2.3.3 Dinamik benzerlik
Geometrik ve kinematik olarak benzer sistemlerde dinamik benzerliğin de sağlanması için, geometrik olarak benzer konumlardaki kuvvet vektörleri paralel ve mutlak değerleri orantılı olmalıdır. Örneğin, etkin kuvvetlerin basınç kuvveti, kesme kuvveti, yerçekimi kuvveti, olduğu bir deneyde,
(Fp/Fv) m = (Fp/Fv)p = sabit ve (Fp/Fg)m = (Fp/Fg)p = sabit olmalıdır.
Fp = basınç kuvveti, Fv = kesme kuvveti, Fg = yerçekimi kuvveti,
Akışkan hareketi sırasında atalet, viskozite, basınç, yerçekimi, yüzey gerilimi ve sıkıştırılabilirlik kuvvetleri ile karşılaşılır. Herhangi iki kuvvetin birbirine oranı boyutsuz olacaktır. Aslında dinamik benzerlik için analiz sonucunda elde edilen boyutsuz katsayıların model ve prototip için aynı olması gerekir. Geometrik benzer akışlar için ise sadece bir boyutsuz katsayının eşit olması yeterlidir. Otomobil üzerindeki akışın incelendiği bu çalışma için etkin kuvvetler atalet ve viskoz kuvvetlerdir. Eş. 2.12 'de verilen Re sayısı atalet kuvvetlerinin, viskoz kuvvetlerine oranıyla elde edilir.
![]() Atalet
kuvveti/Viskoz kuvet =
Atalet
kuvveti/Viskoz kuvet = [2.24]
[2.24]
g = kinematik viskozite
Atalet ve viskoz kuvvetin etkin kuvvet olduğu örneklerde tam dinamik benzerliğin sağlanması için Re sayılarının model ve prototip için aynı olmaları gerekir. Ancak eşitlikten görüldüğü üzere model ve prototip aynı boyutlarda olmadığı sürece, Re sayılarında eşitliğin sağlanması çok güçtür. Zira kinematik viskozitesi sudan küçük tek sıvı civadır. Ancak ölçülen büyüklükleri ifade eden boyutsuz katsayılar belirli bir hız değerinin üzerinde Reynolds sayısından etkilenmiyor ve Re sayısı arttıkça değişmiyorsa dinamik benzerlik sağlanmış demektir. Bu çalışmada da eksik benzerlik sözkonusudur ve CD, CL ve CMR katsayılarının değerinin artık değişmediği Re sayısı tesbit edilmiş ve değerlendirmeler Re sayısının bu değerinden sonraki hız aralığı için yapılmıştır.
3. ÖLÇME TEÇHİZATI VE ÖLÇÜM PRENSİPLERİ
Bu deneysel çalışmada bir binek otomobil modelinin aerodinamik karakteristiği, rüzgar tünelinde çeşitli serbest akış hızlarına karşılık, model üzerindeki çeşitli noktalarda basınç, sürüklenme direnci kuvveti, kaldırma kuvvetleri ölçülerek belirlenmeye çalışıldığından yapılan ölçümler aşağıdaki üç ayrı başlık altında toplanabilir.
a) Akış Hızı Ölçümü
b) Basınç Ölçümü
c) Kuvvet Ölçümü
Bu bölümde, kullanılan teçhizat ve bu çalışmada ne amaçla kullanıldığı özetlendikten sonra, yukarıdaki başlıklar altında, ölçme prensibi ve teknik özellikleri açıklanmıştır.
1) Rüzgar tüneli : Deney odasına modelin yerleştirilebildiği ve akış hızının değiştirilerek istenilen şartların oluşturulduğu deney ortamı olarak kullanılmıştır.
2) Fark basınç ölçer : Araç üzerindeki basınç dağılımı ölçümlerinde ve rüzgar tüneli içerisindeki serbest akış hızının ölçümünde pitot tüpü ile birlikte kullanılmıştır.
3) Kuvvet ölçüm düzeneği : Üç adet yük hücresi kullanılarak bu çalışma için tasarlanmış özel düzenektir. Sürüklenme direnci ve kaldırma kuvvetlerinin ölçümünde kullanılmıştır.
4) Elektronik gösterge : Kuvvet ölçüm düzeneğine bağlanarak her bir yük hücresine düşen yükün ölçümünde gösterge olarak kullanılmıştır.
5) Sıcaklık ve nem ölçer: Deneylerin yapıldığı laboratuvarın ortam koşullarının belirlenmesi amacıyla kullanılmıştır.
6) Kalibrasyon ağırlıkları : Kuvvet ölçüm düzeneğinin kalibrasyonu amacıyla kullanılmış ağırlık etalonlarıdır.
3.1 Rüzgar Tüneli
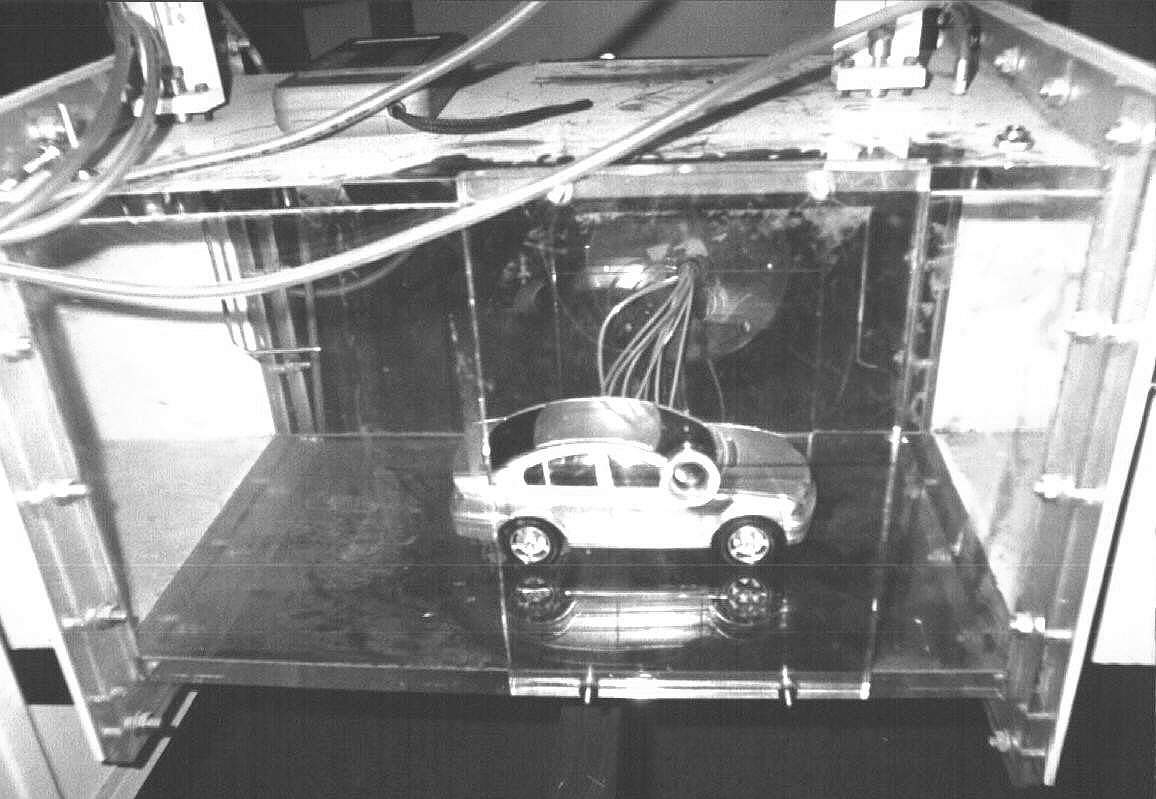
Deneylerde Gazi Üniversitesi Mühendislik Mimarlık Fakültesi (GMMF) Aerodinamik Laboratuvarına ait "Plint & Partners" marka açık tip rüzgar tüneli kullanıldı. Tünel çelik iskelet üzerine alüminyum gövdeden yapılmıştır. Tünele hava girişi emiş yönündedir ve hava giriş tarafı bir kafesle korunmuştur.
Tünelde akış hızı, fan arkasına yerleştirilmiş iki kelebek vananın açılıp kapatılmasıyla elle ayarlanır. Vananın tam kapalı pozisyonunda hız minimum değerde iken, tam açık pozisyonunda hız maksimum değere ulaşmaktadır. Tünel içerisinde akışın homojen (yani deney odası içerisinde belirli bir serbest akış hızı değerinde hızın her noktada aynı olması) ve kararlı olmasını (belirli bir hıza ayarlandıktan sonra zamana bağlı hız değişiminin olmaması) sağlamak amacıyla bir stabilizör ve çalışma sırasında gürültü seviyesini azaltmak için bir susturucu bulunmaktadır. Tünel deney odasının ön ve arkasında açılabilir iki kapak bulunmakta ve deney odasına model yerleştirimi için kullanılmaktadır. Basınç ölçümleri için tünele sabitlenmiş 24 kolonlu sıvı manometre, akış hızı ölçümü için çıkış uçları deney odasının üzerinde bulunan bir pitot statik tüp ile bir toplam başlıklı tüp bulunmaktadır. Bu tüpler sıvı kolonlu manometrelerin dört kolununa bağlanarak akış hızı ölçülebilmektedir ancak bu çalışmada akış hızı ölçümü amacıyla sıvı kolonlu manometreler kullanılmamıştır. Rüzgar tünelinin diğer teknik özellikleri aşağıda verilmiştir.
Rüzgar tüneli teknik özellikleri
İmalatçı : PLINT & PARTNERS LTD.
Seri No : TE54/8053
Motor Hızı : 2900 rpm
Motor Gücü : 5,7 kW
Boyutları : 4127 mm x 1100 mm x 1600 mm
Deney odası kesit alanı : 300 x300 mm
Max. serbest akış hızı : 40,03 m/s
Basınç ölçme aralığı : 0- 300 mmH2O

Şekil 3.2 Deneylerin yapıldığı rüzgar tünelinin fotoğrafı
Deneylerden önce rüzgar tüneli kesit alanı içerisinde hız dağılımı pitot tüp kullanılarak ölçülmüştür. Rüzgar tüneli kalibrasyon sonuçları Ek-1'de verilmiştir.
3.2 Akış Hızı Ölçüm Sistemi
Deneylerde serbest akış hızı, rüzgar tüneline ait pitot tüpe bağlı elektronik fark basınç ölçer ile ölçülmüştür.
Şekil 3.3' de gösterildiği gibi, akış alanı içinde V1 serbest akış hızı ve P1 basıncında hareket eden akışkan molekülleri B noktasına geldiklerinde pitot tüpü içine girerek tüpün içini doldururlar tüpün içi dolduğunda akışkan molekülleri B noktasında duracaklar ve bu noktadaki hızları 0 olacaktır. Bu nedenle B noktasındaki basınca durma noktası veya stagnasyon basıncı veya toplam basınç (stagnation pressure) denir. Hız B noktasında 0 olduğuna göre bu noktaki basınç da P1 basıncından büyük olacaktır. Eğer serbest akış basıncı olan P1, kanala A noktasından açılan bir delikten bir basınç ölçer ile ölçülürse, statik basınç yani serbest akış basıncı (P1) ile toplam basınç (P0) arasındaki farktan Bernoulli denklemi A ve B noktaları için uygulanarak akışın serbest hızı bulunabilir.
![]() [3.1]
[3.1]
Stagnasyon basıncı ile statik basınç arasındaki farka dinamik basınç denir
![]() = dinamik basınç [3.2]
= dinamik basınç [3.2]
Bu çalışmada kullanılan pitot tüpü, hem statik hem de stagnasyon (toplam) basıncı aynı anda ölçen kombine pitot tüpdür. Bu pitot tüplerinde tüpün iki yanında statik basınç ölçüm delikleri bulunur. Statik ve stagnasyon noktası basınçları bir fark basınç ölçer ile aynı anda okunup, elektronik bir fark basınç ölçer ile Eş. 3.1 kullanılarak hıza çevrilip cihazın göstergesinden direkt olarak serbest akış hızı okunabilir. Elektronik fark basınç ölçer göstergesinde hem dinamik basınç (yani stagnasyon ve statik nokta basınçları arasındaki fark) hem de akış hızı mevcut olup istenen parametre seçilerek okumalar yapılabilir.
3.3 Basınç Ölçüm Sistemi
Rüzgar tüneline ait 24 kolonlu sulu manometre bulunmakla birlikte deneylerde bu düzeneğin yalnızca hortum bağlantıları kullanıldı. Basınç ölçümlerinde doğruluğun istenen düzeyde olması amacıyla elektronik fark basınç ölçer kullanıldı. Bu cihazın teknik özellikleri aşağıda verilmiştir. Fark basınç ölçer, içerisinde iki adet basınç portundan gelen basınçları ayrı ayrı okuyabilen bir dönüştürücüden (transduser) oluşmaktadır. Cihazın pozitif ve negatif portlarından uygulanan basınçlar arasındaki fark elektronik göstergeden okunabilir. Eğer yalnızca bir noktanın atmosfer basıncından farkı ölçülmek isteniyorsa cihazın negatif portu atmosfere açık bırakılırken ölçülecek basınç pozitif porta uygulanır. Cihazın en önemli özelliği bir pitot tüple birlikte kullanılarak akış hızını ölçebilmesidir. Yani okuduğu dinamik basıncı (stagnasyon basıncı-statik basınç) Bernoulli denklemini kullanarak istenen birimde akış hızına çevirebilmesidir. Cihaz yüksek doğrulukla basınç ölçebildiği için model üzerindeki basınç dağılımının tesbitinde de kullanılmıştır.
Elektronik fark basınç ölçer teknik özellikleri
| Marka / Model : AIRFLOW /PVM 100 Hız Ölçme Aralığı : 0 - 76 m/s Basınç Ölçme Aralığı : 0 - 3500 Pa Çözünürlük (hız) : 0,1 m/s Çözünürlük (basınç ) : 1 Pa Doğruluk : ± 1 %f.M1 ±1 digit |
|
( %f.M (from measurement) : Ölçülen
değer üzerinden % bağıl hata oranı. Ölçme aralığı -10,
100 birim olan bir ölçü aletinin doğruluğu %2 f.M
olarak verilmiş ve bir ölçme işleminde bu ölçü aleti 80
birim gösteriyorsa ölçtüğü değer ![]() birim hatalı olabilir anlamına gelir. )
birim hatalı olabilir anlamına gelir. )
Tekrarlanabilirlik : ±1 Pa
Fark basınç ölçer işlem öncesi ve sonrası bir kalibrasyon laboratuvarında kalibre edilmiş olup kalibrasyon sonuçları Ek-2 ve Ek-3'de verilmiştir.
Şekil 3.6 Rüzgar tünelinde basınç ölçüm sisteminin bir görünüşü
3.4 Kuvvet Ölçme Sistemi
Bu çalışmada kullanılan kuvvet ölçme sistemi yük hücreleri (load cell) kullanılarak tasarlanmış bir düzenek ve ona bağlı bir elektronik gösterge ve komutatörden oluşmaktadır. Bu bölümde yük hücrelerinin çalışma prensipleri kısaca özetlendikten sonra hazırlanan düzenek ve elektronik load cell göstergesi tanıtılmıştır.
3.4.1 Yük hücreleri (Load cell)
Kuvvet ölçme sisteminin tasarımında 3 adet yük hücresi kullanıldı. Aşağıda yük hücresi ve gerinme pulu (strain gauge) ile ilgi teorik detaylara girilmeden, bu çalışmada cihazların kullanımının doğru yapılması için önemli olan çalışma prensipleri özetlenmiştir.
Yük hücreleri, gerinim pullarının belirli bir sistematikle bir Wheatstone köprüsü oluşturacak şekilde birleştirilmesiyle oluşur. Gerinme pulları, üzerlerine düşen yük miktarına göre yapıştırıldıkları yüzeyde meydana gelen deformasyon sonucu boyları uzayan, buna bağlı olarak elektriksel dirençleri değişen ince tellerdir. Yük hücrelerinin çalışma prensibine göre, gerinme pullarından oluşan Wheatstone köprüsüne uygulanan giriş (excitation) voltajına karşılık köprünün belirli iki noktasından üzerine düşen yük miktarına göre değişen çıkış voltajı ölçülür. İmalatçılar yük hücrelerinin teknik özelliklerinde cihazın maksimum ölçme değerindeki çıkış voltajının giriş voltajına (excitation voltage) oranını verirler. Bu oran cihazın ölçme aralığı içinde lineer dağılır.
Örneğin maksimum yükü 500N olan bir yük hücresinin çıkış oranı 3mV/V verilmişse; 500N' luk yükte ve 5V giriş voltajına karşılık çıkış voltajı = (3mV/Vx5V) = 15mV olacaktır. Eğer yük 400 N olarak uygulanırsa çıkış oranı ;
((400 N x 3mV/V)/500 N=2,4 mV/V 'a düşecek ve çıkış voltajı
(5 V*2,4 mV/V) = 12 mV olacaktır.
Günümüzde yük hücreleri, yapılarındaki gerinme pullarının sıcaklık değişimi sonucu elektriksel dirençleri de değişeceği için sıcaklık değişimlerinden etkilenmeyecek şekilde imal edilirler. İmalatçılar köprü dirençlerine bazı ilave dirençler ekleyerek sonuçta yük hücresinin sıcaklık değişiminden kaynaklanan hatalarını kompanze etmeye çalışırlar.
Gerinme pulları çeşitli yüzeylere değişik biçimlerde yapıştırılarak amaca uygun çok çeşitli yük hücreleri yapılabilir. Teknolojideki gelişmeler sonucu yük hücreleri gerektiğinde çok küçük, gerektiğinde çok büyük boyutlarda yapılabilmektedir. Bu çalışmada kullanılan yük hücreleri ince yaprak formunda, tam köprülü ve sıcaklık düzeltmesi yapabilen yük hücreleridir.
3.4.2 Kuvvet ölçüm düzeneği
Kuvvet ölçümleri için deneyde kullanılacak rüzgar tüneli ve model boyutları düşünülerek blokaj hatalarının artmasına neden olmayacak büyüklükte bir sistem yapılması gerektiği düşünüldü. Bu çalışmada CD sürüklenme direnci katsayısı ve CL kaldırma kuvveti katsayısını yüksek doğrulukla belirlemek amaçlandığından sadece buna yönelik bir sistem tasarlandı. Bunun için sürüklenme direncini ölçecek ve model aracın hareket yönüne dik yerleştirilecek bir adet load cell ile ön ve arka tekerleklerin baskı-kaldırma kuvvetlerini ayrı ayrı ölçmek için iki adet olmak üzere toplam üç adet load cell hazırlandı. Günümüzde kullanılan binek otomobillerin CD ve CL katsayılarının düzeyinin 0,3-0,4 aralığında olduğu gözönüne alınarak deneyler sırasında ölçülebilecek kuvvetlerin tahmini aralığı ile bu katsayıları belirlerken ihtiyaç duyulacak doğruluk oranı belirlendi. Elde edilen sonuçlara göre temin edilecek load cell'lerin teknik gerekliliklerine karar verildi. Buna göre load cell imalatçı kataloglarından ihtiyaca uygun boyut ve teknik özelliklere sahip olanlar araştırıldı.
Aşağıda serbest akış hızının 25 m/s değeri için, kötümser bir yaklaşımla CL= 0,2 ve CD = 0,4 tahmin edilerek kaldırma ve sürüklenme direnci kuvvetlerinin tahmini maksimum değerleri hesaplanmıştır.
CL= 0,2 CD= 0,4 r = 1,22 kg/m³ V = 25 m/s A = 0,0095 m²
FL = (CL*1/2*r *V2*A) = 0,724 N = 74 gram
FD = (CD*1/2*r *V2*A) = 1,449 N = 148 gram
Kaldırma kuvvetini ölçen iki adet yük hücresi, 340g olan modelin ağırlığını da eşit olarak paylaşacakları için herbiri üzerine 170g yük düşecektir. Bu yük hücreleri 250g kapasiteli, sürüklenme direnci kuvvetini ölçen yük hücresi ise 150 g kapasiteli olarak seçilmiştir.
Uygun olduğuna karar verilerek temin edilen load cell'lerin teknik özellikleri aşağıda verilmiştir.
Yük hücreleri teknik özellikleri
İmalatçı / Model : Omega / LCL
Kapasite : 250 g / 150 g
Excitation : 5 Vdc, 12 Volt maximum
Çıkış Oranı : 2 mV/V
Sıfır Dengesi : ± 0,3 mV/V
Toplam Hata Oranı : 0,25 %f.S1
(Kaldırma kuvveti ölçen load celler için ± 0,6g = ± 0,006N, sürüklenme direnci ölçen load cell için ± 0,4g = ± 0,004N' a karşılık gelir)
Çalışma Sıcaklığı : -7, 50 °C
Sıcaklık Etkileri : 0,02 %f.S/°C
Emniyet Sınırı : 150 %f.S
( %f.S
(full scale) : Ölçek aralığına göre % hata oranı. Ölçme
aralığı -10, 100 birim olan bir ölçü aletinin ölçek
aralığı = 100-(-10) = 110 birimdir. Bu ölçü aletinin
doğruluğu %2 f.S olarak verilmişse, ölçü aleti herhangi bir
değerde ![]() birim
hatalı ölçüm yapabilir. )
birim
hatalı ölçüm yapabilir. )
Kuvvet ölçme sisteminin şematik çizimleri Şekil 3.8 ve Şekil 3.9'de verilmiştir.
3.4.3 Elektronik gösterge (Load Cell göstergesi)
Yük hücresi göstergesi "strain gauge" bazlı dönüştürücüler (transduserler) veya load cell'ler için tasarlanmış köprü kuvvetlendirici gösterge şeklinde tanımlanabilir.
Gösterge köprü besleme voltajı ile kendisine bağlanan load cell girişine, uygun giriş (exciation) voltajını uygular. Load cell çıkış uçları göstergeye bağlanır ve göstergeden direkt olarak mV okunur. İstenirse load cell'in ağırlıklarla kalibrasyon sonucuna göre göstergeye f(x) =mX+C şeklinde fonksiyon tanıtılarak gösterge çıkışı istenen kuvvet birimi şekline dönüştürülebilir (N vb).
Taksimat : 0,0001 ile 1 arasında
seçilebilir
Ölçme Aralığı : 0- 20 mV
Doğruluk : % 0,1 f. S (Bu çalışma için ± 0,02 mV 'a
karşılık gelir.)
Sinyal Giriş : -20, +20 V arası
Köprü Besleme : 1, 2.5, 5, 10 Vdc seçilebilir.
Sıfırlama : Tuş ile
Gösterge Birimi : f(x) seçilebilir.
Load Cell'ler göstergeye bağlı olarak işlem öncesi kalibre edilmiştir. Ölçüm sonuçları Ek-4 ile Ek-9 arasında verilmiştir.
Şekil 3.10
4 DENEYLERİN YAPILIŞI VE VERİLERİN TOPLANMASI
Kuvvet düzeneğinin imal edilmesi, deney ekipmanın hazırlanıp teçhizatın fonksiyonel kontrollerinin tamamlanmasından sonra öncelikle deneme ölçümleri alındı. Deneme ölçümleri sırasında bazı aksaklıklar, eksik ekipman ve aksesuarlar tesbit edildi. Bu eksiklikler giderildikten sonra, ölçümler farklı zamanlarda tekrarlandı. Genel olarak deneyler iki aşamada gerçekleştirildi. Birinci aşamada basınç dağılımını belirlemek üzere model üzerinde açılan yüzeye dik 11 ayrı delikten farklı serbest akış hızlarında basınç ölçümleri yapıldı. İkinci aşamada serbest akış hızı küçükten büyüğe değiştirilerek sürüklenme ve kaldırma kuvvetleri ölçüldü. Bu kuvvet ölçümleri 6 ayrı zamanda 6 seri ölçüm şeklinde tekrarlandı.
Bu bölümde deneylerin yapıldığı ortam koşulları ve model özellikleri tanıtıldıktan sonra deneyler sırasında izlenen işlem sırası anlatılmıştır. Alınan ölçüm sonuçları çizelge ve grafik olarak verilmiştir ve ölçüm sonuçlarının sonlarında verilerle ilgili kısa bir değerlendirme yapılmıştır.
4.1 Ortam Şartları
Deneyler GMMF Aerodinamik Laboratuvarında yapılmıştır. Laboratuvar tasarımı gereği aydınlatma ve güneş ışığı almama gibi kritelerleri sağlamaktaydı. Laboratuvar ortam şartları kontrol altında tutulmamakla birlikte deneyler öncesinde laboratuvarın sıcaklık ve nem değerleri bir termometre ve mekanik bir higrometre ile ölçülmüştür. Ölçülen sıcaklık ve nem değerlerinin, deneylerde kullanılan teçhizat için imalatçılarının belirlediği çalışma ortam şartlarını sağladığı görülmüştür. Bununla birlikte her deney öncesinde teçhizat laboratuvar ortamında koşullandırma için 1 saat açık bekletilmiştir. Deneylerin yapıldığı farklı zamanlarda, laboratuvarın sıcaklık ve nem koşullarının aşağıdaki değerler arasında kaldığı gözlenmiştir.
Sıcaklık : 10 ± 5 °C Nem (Bağıl) : 40 ± 10 % rh
Değerlendirme işlemlerinde bu ortam şartlarındaki havanın aşağıda verilen fiziksel özellikleri kullanılmıştır.
r = 1,222 kg/m³ µ = 1,789 x 10-5 Pas
4.2 Model Tanımı
Model piyasada kullanılan BMW 3 serisi bir binek otomobilin 1/16 ölçeğinde küçültülmüş ve aşağıdaki özelliklere sahip bir örneğidir.
Malzeme : Plastik
Görünüş : Metalik-gri boyalı-
pürüzsüz
Ağırlık : 339,4 gr
Yükseklik : 89 mm
Genişlik : 110 mm
Karakteristik Alan (A) : 0,0095 m²
Uzunluk ( L ) : 280 mm
Akslar Arası Uzaklık (l) : 168 mm
Şekil 4.1
Karakteristik alan, modelin önden görünüşü büyütme oranı belirlenmiş bir projeksiyon makinası ile bir ekrana yansıtılıp, ön görünüşteki alanın ekrandan ölçülmesi sonucu hesaplanmıştır.
4.3 Basınç Ölçümlerinin Yapılışı
Model üzerinde basınç dağılımını belirlemek için Şekil 4.1'gösterilen basınç portlarından 12 farklı serbest akış hızı değerinde üç seri ölçüm alındı. Ölçümlerde kullanılan fark basınç ölçer işlemlerden önce ve sonra bir Metronorm A.Ş. kalibrasyon laboratuvarında kalibre edildi. Fark basınç ölçerin kalibrasyon sonuçları Ek-2 ve Ek-3'de verilmiştir.
Modelin üzerine ve yüzeye dik olarak açılan deliklere modelin içerisinden yapıştırılan küçük bakır borular, her bir deliğe karşılık alt yüzeyde açılmış deliklere model içerisinden hortumlarla bağlanmıştır. 11 adet basınç ölçüm portu alt yüzeydeki bakır borulara takılan hortumlarla bir demet halinde tünel dışına taşınmış, hortumlar ve portlar önceden numaralanarak işaretlenmiştir. Model, rüzgar tüneli deney odacığının tabanına, tekerleklerin altına yapıştırılan çift taraflı bantlarla sabitlenerek aşağıdaki işlem sırası takip edilmiştir.
1. Fark basınç ölçer ile pitot tüp bağlantısı yapıldı. Fark basınç ölçer göstergesi akış hızı ölçüm konumuna alınarak göstergesi sıfırlandı. Deneylerin yapıldığı Aerodinamik Laboratuvarında 1 saat açık bekletilerek ortam koşullarında ısınması için beklendi.
2. Bekleme süresinin sonunda göstergede sıfır kayması varsa sıfırlandı. Tünel serbest akış hızı, fark basınç ölçer göstergesinden takip edilmek suretiyle manuel olarak istenilen değere ayarlandı. 1 dakikalık bir süre boyunca hızın istenilen değerde kararlı olduğu görüldükten sonra ayarlanan hız değeri hazırlanan deney formuna kaydedildi.
3. Fark basınç ölçerin negatif basınç portu tünelin statik basıncını ölçmek üzere pitot tüpünün statik basınç ölçme portuna bağlı bırakıldı. Pozitif portu ise pitot tüpünden ayrıldı ve cihaz basınç ölçme moduna getirildi.
4. Fark basınç ölçer pozitif portu, hızın stabil olduğu bu değerde modele bağlı basınç portlarına sırasıyla bağlanarak herbir portun basıncı ölçülüp ayrı ayrı kaydedildi.
Bir serbest akış hızı değeri için tüm portların basıncı ölçüldükten sonra 2. maddeden sonraki işlemler aynı serbest akış hızı değeri için iki kez daha tekrarlandı. İstenilen minimum serbest akış hızından max. serbest akış hızına kadar tüm portların basınçları üç seri halinde yukarıda anlatıldığı gibi ölçüldü. 3 seri alınan ölçüm sonuçlarının ortalamaları hıza bağlı olarak Çizelge 4.1 ve Şekil 4.3'de verilmiştir.
Çizelge ve şekillerde ; D Port : Bir basınç ölçüm portu için belirli bir hız değerinde üç seride alınan basınç ölçümlerinin aritmetik ortalaması
Yapılan ölçümler incelendiğinde her bir port için basınç düşümünün Bernoulli denklemine uygun olarak hızın karesiyle doğru orantılı olarak arttığı görülür. Sonuçlara bakıldığında modelin ön aks hizasındaki kaldırma kuvvetinin arka aks hizasındaki kaldırma kuvvetine göre çok daha düşük olması ve hatta modelin ön ucunda kaldırma yönünde değil baskı yönünde etkiyen çok küçük bir kuvvet ölçümü beklenmelidir. İlk portdan ölçülen ve pozitif yönde etki eden bu basıncın değerinde gözlenen dalgalanma modelin ön tarafında etkili olan baskı kuvvetinin çok küçük bir alana etki ettiği izlenimini vermektedir. Çünkü 2. port basıncı da negatif yönde yani kaldırma yönünde etki etmektedir.
4.4 Kuvvet Ölçümlerinin Yapılışı
Deneylerin ikinci aşamasında 10 farklı serbest akış hızı değerine karşılık, model üzerine etki eden kaldırma ve sürüklenme direnci kuvvetleri ölçüldü. Kuvvet sistemine ait load cell'ler işlemlerden bir gün önce Metronorm A.Ş. kalibrasyon laboratuvarında kalibrasyonlu hassas ağırlık etalonları kullanılarak kalibre edildi. Deneyler sırasında, kuvvet sistemi gösterge ile bağlantısı yapıldıktan sonra gösterge, deneylerin yapıldığı laboratuvar ortamında 1 saat açık bekletilmek suretiyle ısınmaya bırakıldı. Isınma süresinin sonunda load cell'lerin ağırlık etalonları ile kalibrasyonları tekrar edildi. Her load cell için, kalibrasyon işlemlerinin ilkine ve sonuncusuna ait sonuçlar Ek-4'den itibaren verilmiştir.
Deneylerde ölçümler, 3 kez deneme ve 6 kez verilerin analizinde kullanılmak üzere 9 kez tekrarlandı. İlk üç deneme ölçümünde kuvvet sisteminin olası hataları tesbit edilip giderildi. Deneme ölçümlerinde kuvvet sisteminin yanları ve önünde hava geçişine neden olabilecek açıklıklar olduğu ve bunlardan kaynaklanan hatalar olabileceği farkedilip kuvvet sisteminin yanları kapatıldı ve sisteme, önündeki açıklığı kapatacak şekilde bir eğik düzlem entegre edildikten sonra ölçümler alındı. Ayrıca kuvvet sisteminin kendisinden kaynaklanan ve sürüklenme direnç kuvveti ölçümünü etkileyecek hataları tesbit etmek üzere, model, kuvvet sisteminin üzerinde olduğu halde, sürüklenme direnci kuvvetini ölçen load cell'e yük binmemesi (değmemesi) sağlanarak farklı hızlar için sürüklenme direnci kuvveti ölçüldü. Ancak bu ölçümlerin sonucunda sürüklenme direnci kuvveti tüm hız değerleri için sıfır okunduğundan, kuvvet sisteminin kendi aerodinamik karaketerinin model araç üzerindeyken etkisiz hale geldiği görüldü. Sistemdeki tüm değişiklikler yapıldıktan sonra ölçümler, farklı serbest akış hızları için 6 kez tekrarlandı. Ölçümlerde sisteme ait load cell'lerin çıkışı bir seçici ile sırasıyla seçilerek göstergeye aktarıldı. Load cell göstergesinin çıkışı mV cinsinden okundu. Newton-mV çevrimi için her bir load cell'in kalibrasyon sonuçlarından bulunan çarpım faktörleri kullanıldı.
Örneğin K1 x mV =FL-ön (Newton)
(K=Load cell çarpım faktörü olup K1, 1 no'lu load cell için çarpım faktörünü gösterir)
Kuvvet sisteminin load cell'leri aşağıdaki gibi numaralandı.
1- Ön tekerleklerden kaldırma-baskı kuvvetini ölçen load cell
2- Arka tekerleklerden kaldırma-baskı kuvvetini ölçen load cell
3- Sürüklenme direnci kuvvetini ölçen load cell
Kuvvet ölçümlerinde aşağıdaki işlem sırası takip edildi:
1. Kuvvet sistemi düz bir masa üzerine yerleştirilip yük hücreleri-seçici-gösterge bağlantıları yapıldı.
2. Gösterge deneylerin yapılacağı laboratuvar ortamında 1 saat açık bekletilerek ısınmaya bırakıldı.
3. Isınma süresinin sonunda seçiciden 1 no'lu load cell seçildi. Ağırlık etalonları sırasıyla load cell yük merkezine yerleştirilerek 3 kez artırma, 1 kez azaltma yönünde 4 seri ölçüm alındı. Ağırlıkların gram cinsinden değerlerine karşılık göstergeden okunan mV değerleri kaydedildi.
4. Seçiciden 2 no'lu load cell seçildi. Bu load cell'in kalibrasyonu da 3.maddede anlatıldığı gibi yapıldı.
5. 3 no'lu load cell'in dikey pozisyonu kalibrasyon için önceden hazırlanmış düzen sayesinde yatay hale getirildikten sonra 3. madde bu load cell için de aynen tekrarlandı.
6. Kuvvet sistemi-seçici-gösterge bağlantıları söküldü. Kuvvet sistemi rüzgar tüneli deney odacığının ortasına cetvel kullanılarak merkezinden geçen eksen, akış yönüne tam paralel olacak şekilde yerleştirildi. Load cell kabloları tünelin çıkış borusundan demet halinde dışarı alındı. Model araç, kuvvet ölçüm sisteminin üzerine yerleştirildi.
7. Load cellerin dışarı alınan kabloları ile seçici ve gösterge bağlantıları yapıldı. Bu pozisyonda sistemin ortamla dengeye gelmesi için gösterge açık tutularak 15 dk. beklemeye geçildi.
8. Bekleme süresinin sonunda rüzgar tüneli hızı elle ayarlanıp, fark basınç ölçer ve tünele ait pitot tüp kullanılarak ölçüldü. Kararlı serbest akış hızı gözlendiğinde, kuvvet sisteminin üç load cell'i seçiciden sırasıyla seçilip her bir load cell için göstergeden okunan mV değeri kaydedildi.
9. 10 farklı serbest akış hızı için, tüm load cell'lerden okunan değerler kaydedildikten sonra, ölçümler tekrarlandı.
10. Ölçümler sonunda kuvvet sistemi tünel dışına alınarak 1-5. maddeler arasındaki işlemler tekrarlanarak load cell kalibrasyonlarının değişip değişmediği kontrol edildi.
Deneyler farklı zamanlarda tekrar edildiği ve rüzgar tüneli hız ayarı manuel olarak yapıldığı için tüm serilerden aynı hızlarda ölçüm almak mümkün olmamıştır. Alınan tüm ölçüm sonuçları birim (mV-N ) çevrimleri yapılarak Çizelge 4.2' de verilmiş ve Şekil 4.4 de gafik üzerinde gösterilmiştir. (Deneyler sırasında elektronik göstergeden okunan "mV" değerleri Ek-11'de ayrıca verilmiştir.)
Çizelge ve grafiklerde;
FLön : Ön aks
hizasından etki eden baskı-kaldırma kuvvetini,
FLarka : Ön aks
hizasından etki eden kaldırma kuvvetini,
FL : Toplam
kaldırma kuvvetini,
FD : Sürüklenme kuvvetini,
göstermektedir. (Elektronik load cell göstergesi, FL'nin "+" yönünü baskı, "-" yönünü kaldırma kuvveti gösterecek şekilde ayarlanmıştır.)
Yapılan ölçümler incelendiğinde ön aks hizasından etki eden kuvetin basınç ölçümlerinden de anlaşıldığı gibi baskı kuvveti olduğu ve ölçümlerin diğer kuvvetlere oranla kararsız olduğu görülmektedir. Bunun nedeni, baskı yönünde etki eden bu kuvvetin çok küçük bir alanda etkili olması ve değerinin çok küçük olması olabilir. Şekil 4.4 ölçülen değerlerin hıza bağlı olarak düzgün birer parabol çizdiklerini göstermektedir. Arka aks hizasından etkiyen kaldırma kuvvetinin ve sürüklenme kuvvetinin değerlerindeki dalgalanmalar oldukça küçüktür. Bu tekrarlanabilirlik hatalarının kaynağı deneylerde kullanılan kuvvet ölçme sistemi ve/veya rüzgar tüneli hızındaki küçük dalgalanmalar olabilir.
Çizelge 4.2 ve Şekil 4.4 de ön ve arka aks hizasından etki eden baskı ve kaldırma kuvvetleri değerlerinin farklı olduğu görülmektedir bunun sonucu olarak model araç üzerinde bir yunuslama momenti oluşmaktadır.
Bu çalışmada önemli olduğundan, toplam CL katsayısının hesabı için toplam kaldırma kuvvetinin de hesaplanmasına ihtiyaç duyulmuştur. Toplam kaldırma kuvveti model aracın ön ve arka aks hizalarından etkiyen iki kuvvetin toplamı olarak Çizelge 4.3 ve Şekil 4.5'de verilmiştir.
FL = FLön + FL arka [4.1]
Ana Sayfa || Hakkımızda || İletişim || Forum || Eğitim || Servis || CALexpert
Tüm hakları saklıdır _ METROLOJİ OKULU _ (2005 - 2006)